Präzision in Bewegung: Die Wahl der richtigen Schrittmotorsteuerung ist entscheidend für Ihre Anwendung.
- Die Kernfunktion einer Schrittmotorsteuerung ist die präzise Ansteuerung der Motorwicklungen zur Erzeugung definierter Drehbewegungen und Drehmomente.
- Es gibt grundlegende Unterschiede zwischen Open-Loop- (kostengünstig, Standard) und Closed-Loop-Systemen (maximale Präzision durch Encoder-Rückmeldung), sowie zwischen Konstantspannungs- und den heute dominierenden Konstantstrom- (Chopper-) Steuerungen.
- Technologien wie Mikroschrittbetrieb (für Laufruhe und höhere Auflösung) und intelligente Treiber-ICs (mit Features wie StallGuard™ und CoolStep™) sind entscheidend für moderne Anwendungen.
- Schrittmotorsteuerungen sind in der Automobilindustrie unverzichtbar, etwa für adaptives Kurvenlicht, Klimaanlagen und elektronische Drosselklappen.
- Die Auswahl der passenden Steuerung erfordert die Berücksichtigung von Motorspannung, Phasenstrom, Schnittstelle, Mikroschritt-Auflösung und Schutzfunktionen.
- Die Entscheidung zwischen Kauf und Eigenbau hängt von den Anforderungen an Professionalität, Kosten und dem technischen Know-how ab.
Warum die richtige Steuerung über die Leistung Ihres Schrittmotors entscheidet
Eine Schrittmotorsteuerung, oft auch als Treiber bezeichnet, ist das Gehirn hinter jeder präzisen Schrittmotorbewegung. Ihre Kernfunktion ist es, die simplen Steuersignale, die von einem übergeordneten Controller sei es ein Mikrocontroller, eine SPS oder eine CNC-Steuerung kommen, in die komplexen Phasenströme umzuwandeln, die ein Schrittmotor benötigt. Diese präzise Stromzufuhr zu den Motorwicklungen ermöglicht nicht nur eine schrittweise Drehbewegung, sondern auch eine exakte Positionierung und die Erzeugung des notwendigen Drehmoments. Ohne eine passende Steuerung wäre selbst der beste Schrittmotor nur ein nutzloses Stück Metall.
Schrittmotorsteuerungen sind in vielen Bereichen unverzichtbar, wo es auf höchste Präzision ankommt. Ich denke hier sofort an Anwendungen wie:
- CNC-Maschinen: Für die präzise Bewegung von Werkzeugen und Werkstücken.
- Robotik: Für exakte Gelenkpositionierungen.
- 3D-Drucker: Um Schicht für Schicht millimetergenau aufzubauen.
- Laborautomatisierung: Für die genaue Dosierung und Positionierung von Proben.
Besonders in der Automobilbranche spielen Schrittmotorsteuerungen eine immer wichtigere Rolle. Sie sind nicht nur für den Komfort, sondern auch für die Sicherheit entscheidend. Man findet sie beispielsweise in der Scheinwerfer-Leuchtweitenregulierung oder in den präzisen Klappensteuerungen von Klimaanlagen. Diese Anwendungen verdeutlichen, wie kritisch die Zuverlässigkeit und Genauigkeit dieser Komponenten sind.
Das Herzstück der Steuerung: Wie funktioniert sie eigentlich?
Das grundlegende Prinzip der Schrittmotorsteuerung ist faszinierend einfach und doch hochpräzise. Im Kern geht es darum, digitale Signale von einem übergeordneten Controller in mechanische Drehungen zu übersetzen. Dies geschieht, indem die Steuerung die verschiedenen Wicklungen des Schrittmotors in einer genau definierten Sequenz bestromt. Jeder "Schritt" des Motors ist dabei das Ergebnis einer gezielten Aktivierung oder Deaktivierung bestimmter Wicklungen, wodurch das Magnetfeld im Motor so verschoben wird, dass der Rotor sich um einen definierten Winkel weiterdreht.
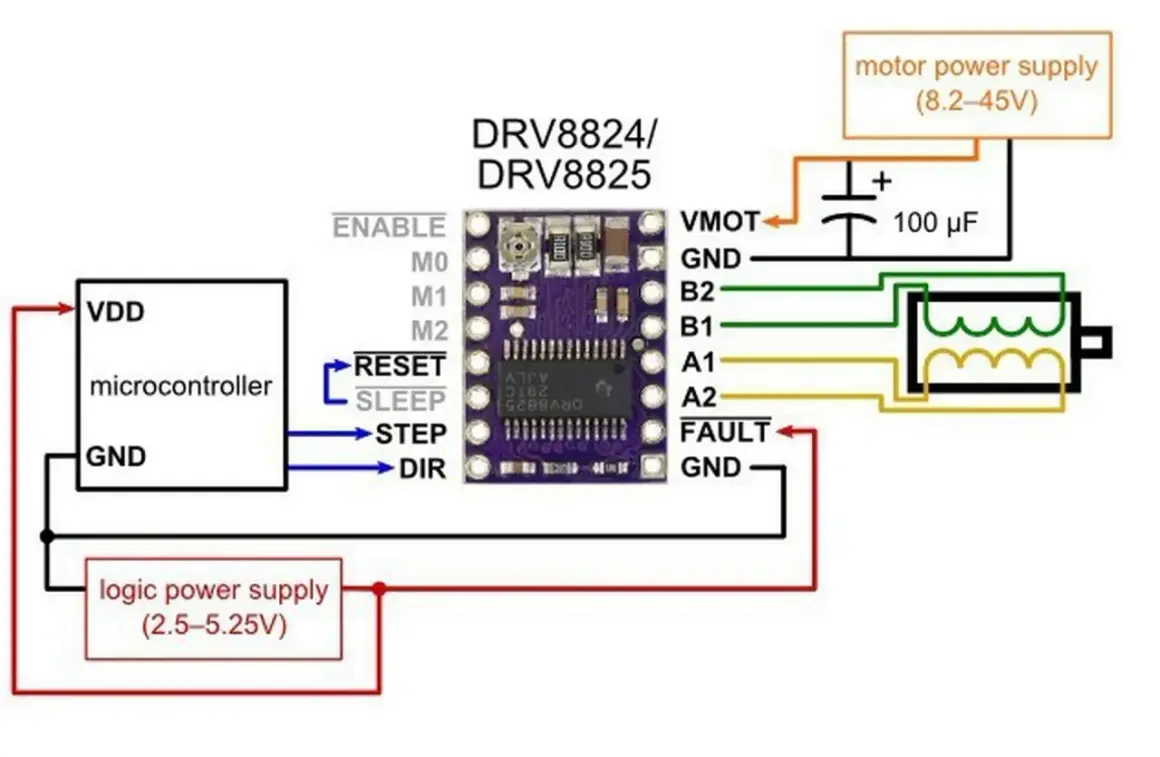
Die klassische Methode zur Ansteuerung von Schrittmotoren basiert auf zwei grundlegenden Steuersignalen: "Schritt" (Step) und "Richtung" (Dir). Das "Schritt"-Signal, oft ein kurzer Puls, veranlasst den Motor, einen einzelnen Schritt auszuführen. Das "Richtung"-Signal, ein logischer Zustand (HIGH oder LOW), bestimmt, ob dieser Schritt im Uhrzeigersinn oder gegen den Uhrzeigersinn erfolgt. Diese einfache, aber effektive Schnittstelle ermöglicht eine sehr intuitive und direkte Kontrolle über die Motorbewegung.
Die eigentliche Magie geschieht bei der Steuerung der Phasenströme. Die Steuerung muss die Ströme durch die einzelnen Wicklungen präzise regeln. Nur so kann das notwendige Magnetfeld erzeugt werden, das den Rotor zuverlässig dreht und das benötigte Drehmoment liefert. Eine ungenaue Stromregelung würde zu unregelmäßigen Schritten, Vibrationen oder sogar zum Stillstand des Motors führen. Hier zeigt sich, wie entscheidend die Qualität der Steuerung für die Gesamtleistung des Systems ist.
Open-Loop vs. Closed-Loop: Welches System passt zu Ihrem Projekt?
Die meisten Standard-Schrittmotorsteuerungen arbeiten im sogenannten Open-Loop-Betrieb (offener Regelkreis). Hierbei sendet der Controller Schrittimpulse an die Steuerung, die diese in Motorbewegungen umsetzt, ohne jedoch eine Rückmeldung über die tatsächlich erreichte Position des Rotors zu erhalten. Die Vorteile liegen klar auf der Hand: Open-Loop-Systeme sind kostengünstig und vergleichsweise einfach zu implementieren. Für viele Anwendungen, bei denen die Last gut bekannt und konstant ist und keine extrem hohen Anforderungen an die Dynamik gestellt werden, ist diese Betriebsart absolut ausreichend.
Der größte Nachteil des Open-Loop-Betriebs ist das Risiko von Schrittverlusten. Wenn der Motor überlastet wird, beispielsweise durch eine zu hohe mechanische Last, eine zu schnelle Beschleunigung oder externe Störungen, kann es passieren, dass der Rotor nicht den vom Controller vorgegebenen Schritt ausführt. Die Steuerung weiß davon nichts und sendet weiterhin Befehle, als wäre alles in Ordnung. Die Folge ist ein Positionsfehler, der sich im Laufe der Zeit akkumulieren kann und die Präzision des gesamten Systems erheblich beeinträchtigt. In kritischen Anwendungen ist das ein No-Go.
Hier kommen Closed-Loop-Systeme (geschlossener Regelkreis) ins Spiel. Sie verwenden einen Encoder, der direkt am Motor angebracht ist und die tatsächliche Rotorposition in Echtzeit an die Steuerung zurückmeldet. Die Steuerung kann dann diese Rückmeldung nutzen, um die Motorbewegung kontinuierlich zu korrigieren und sicherzustellen, dass jeder Schritt exakt ausgeführt wird. Dies verhindert Schrittverluste zuverlässig, steigert die Effizienz, ermöglicht eine höhere Dynamik und bietet eine Präzision, die der von Servomotoren ähnelt. Der Preis dafür ist eine höhere Komplexität und in der Regel auch höhere Kosten.
Um Ihnen die Entscheidung zu erleichtern, habe ich eine kleine Entscheidungshilfe zusammengestellt:
| Merkmal | Open-Loop vs. Closed-Loop | |
|---|---|---|
| Kosten | Geringer | Höher |
| Komplexität | Niedrig | Hoch (zusätzlicher Encoder, komplexere Regelung) |
| Präzision | Gut, aber anfällig für Schrittverluste | Sehr hoch, keine Schrittverluste |
| Dynamik | Begrenzt | Sehr gut, schnelle Reaktion auf Laständerungen |
| Anwendungsbeispiele | 3D-Drucker (Hobby), einfache Positionieraufgaben, Förderbänder | CNC-Maschinen (Industrie), Robotik, medizinische Geräte, präzise Optik |
| Kritikalität der Anwendung | Gering bis mittel | Hoch (keine Toleranz für Positionsfehler) |
Der Schlüssel zur Laufruhe: Die Magie des Mikroschrittbetriebs
Ein Vollschritt eines Schrittmotors kann manchmal zu ruckartig sein und Vibrationen verursachen, besonders bei niedrigen Drehzahlen. Hier kommt der Mikroschrittbetrieb ins Spiel, eine Technik, die einen einzelnen Vollschritt des Motors in viele kleinere Mikroschritte unterteilt. Dies wird erreicht, indem die Phasenströme nicht einfach ein- und ausgeschaltet, sondern sinusförmig angesteuert werden. Die Vorteile sind immens: Der Motor läuft deutlich ruhiger und vibrationsärmer, die Auflösung der Positionierung wird erheblich gesteigert und unangenehme Resonanzphänomene, die bei Vollschrittbetrieb auftreten können, werden effektiv reduziert. Für Anwendungen, bei denen es auf sanfte Bewegungen und höchste Präzision ankommt, ist der Mikroschrittbetrieb unerlässlich.
Um diese sinusförmige Ansteuerung der Phasenströme zu ermöglichen, ist eine präzise Stromregelung notwendig. Hierfür hat sich die Chopper-Regelung, basierend auf Pulsweitenmodulation (PWM), als Standard etabliert. Anstatt die Motorspannung direkt zu regeln, schaltet der Chopper-Regler die Spannung sehr schnell ein und aus, um den durchschnittlichen Strom durch die Wicklungen zu steuern. Dies ermöglicht eine exakte Anpassung der Phasenströme, die für den Mikroschrittbetrieb erforderlich ist, und führt zu einer unglaublich sanften und präzisen Bewegung des Rotors.
Die Mikroschritt-Auflösung kann stark variieren, von 1/2 über 1/16 und 1/32 bis hin zu extrem feinen 1/256 Mikroschritten pro Vollschritt. Die Wahl der richtigen Auflösung hängt stark von Ihren Anforderungen ab. Für einfache Anwendungen mag 1/8 oder 1/16 ausreichend sein. Wenn Sie jedoch maximale Laufruhe, minimale Vibrationen und höchste Positioniergenauigkeit benötigen, wie beispielsweise in optischen Systemen oder bei hochauflösenden 3D-Druckern, empfehle ich, eine höhere Auflösung von 1/64 oder sogar 1/256 in Betracht zu ziehen. Bedenken Sie aber, dass höhere Auflösungen auch höhere Anforderungen an die Rechenleistung des Controllers stellen können.
Die wichtigsten Typen von Steuerungen im direkten Vergleich
Historisch gab es Konstantspannungssteuerungen, die einfach und günstig waren. Doch sie hatten ihre Grenzen: Bei höheren Drehzahlen brach das Drehmoment ein, und die Effizienz ließ zu wünschen übrig. Heute sind Konstantstromsteuerungen, auch als Chopper-Regler bekannt, der unangefochtene Standard. Sie arbeiten mit einer höheren Versorgungsspannung als der Nennspannung des Motors und regeln den Strom durch schnelles Ein- und Ausschalten (PWM). Das Ergebnis ist ein deutlich besseres Drehmoment auch bei hohen Drehzahlen, ein ruhigerer Lauf und eine wesentlich höhere Effizienz. Ich würde Ihnen in den meisten Fällen immer zu einem Chopper-Regler raten.
Moderne Schrittmotorsteuerungen basieren oft auf hochintegrierten Treiber-ICs. Hersteller wie Trinamic oder Allegro bieten hier beeindruckende Lösungen, die nicht nur die reine Logik zur Ansteuerung des Motors, sondern auch alle notwendigen Schutzschaltungen und die Leistungsendstufen in einem einzigen Bauteil vereinen. Diese ICs sind wahre Alleskönner und bieten oft intelligente Features, die den Betrieb noch effizienter und sicherer machen. Das spart Platz, vereinfacht das Design und erhöht die Zuverlässigkeit.
Für industrielle Anwendungen, wo Robustheit und einfache Wartung im Vordergrund stehen, kommen häufig modulare Steuerungssysteme zum Einsatz. Denken Sie an Hutschienenmodule, die sich nahtlos in bestehende Schaltschränke integrieren lassen. Diese Module sind oft für raue Umgebungen ausgelegt, bieten eine hohe Zuverlässigkeit und ermöglichen einen schnellen Austausch im Fehlerfall, was die Stillstandszeiten minimiert.
So wählen Sie die perfekte Schrittmotorsteuerung aus: Eine Checkliste
Die Auswahl der richtigen Schrittmotorsteuerung ist entscheidend für die Leistung und Lebensdauer Ihres Motors. Der erste und wichtigste Schritt ist die Abstimmung von Motorspannung und Phasenstrom der Steuerung auf die Spezifikationen Ihres Motors. Eine zu geringe Stromstärke führt zu mangelndem Drehmoment, eine zu hohe kann den Motor beschädigen. Als Faustregel gilt: Der maximale Phasenstrom der Steuerung sollte leicht über dem Nennstrom des Motors liegen, um Reserven zu haben, aber nicht so hoch, dass der Motor überhitzt. Achten Sie auch auf die maximale Versorgungsspannung der Steuerung, die zur Betriebsspannung Ihres Motors passen muss.
Die Schnittstelle zur Steuerung ist ebenfalls ein wichtiges Kriterium:
- Step/Dir (Schritt/Richtung): Die einfachste und gängigste Schnittstelle für grundlegende Steuerungsaufgaben. Ideal für Mikrocontroller-Projekte oder einfache CNC-Steuerungen.
- SPI (Serial Peripheral Interface): Bietet erweiterte Konfigurationsmöglichkeiten und Rückmeldungen. Ermöglicht die Einstellung von Mikroschrittauflösungen, Stromgrenzen und die Abfrage von Statusinformationen.
- UART (Universal Asynchronous Receiver/Transmitter): Eine weitere serielle Schnittstelle für erweiterte Konfiguration und Kommunikation, oft in komplexeren Systemen verwendet.
- CAN (Controller Area Network) und LIN (Local Interconnect Network): Industrielle Bussysteme, die vor allem im Automobilsektor und in der Industrieautomation zum Einsatz kommen. Sie ermöglichen die Vernetzung mehrerer Steuerungen und Sensoren in einem robusten Netzwerk.
Die Betriebssicherheit und Zuverlässigkeit Ihrer Anwendung hängen maßgeblich von den Schutzfunktionen der Steuerung ab. Ich empfehle, niemals eine Steuerung ohne diese Features zu verwenden:
- Überhitzungsschutz: Schaltet die Steuerung ab oder reduziert den Strom, wenn eine kritische Temperatur erreicht wird, um Schäden zu vermeiden.
- Überstromschutz: Erkennt und verhindert, dass zu hohe Ströme durch die Motorwicklungen fließen, was zu Motorschäden oder Überhitzung führen könnte.
- Kurzschlussschutz: Schützt die Steuerung und den Motor vor Schäden durch Kurzschlüsse in den Wicklungen oder der Verkabelung.
Moderne Treiber-ICs bieten oft intelligente Features, die die Leistung und Effizienz erheblich steigern. StallGuard™ beispielsweise ist eine sensorlose Lasterkennung, die es ermöglicht, eine Überlastung oder das Blockieren des Motors zu erkennen, ohne dass ein externer Sensor benötigt wird. Dies ist ideal für Anwendungen, bei denen der Motor als Endschalter fungiert oder Hindernisse erkennen soll. CoolStep™ wiederum ist eine stromsparende Stromregelung, die den Motorstrom dynamisch an die tatsächliche Last anpasst. Das reduziert die Wärmeentwicklung im Motor und in der Steuerung, was die Lebensdauer verlängert und den Energieverbrauch senkt. Solche intelligenten Funktionen sind ein echter Mehrwert für professionelle Anwendungen.
Fokus Automobilindustrie: Wo Steuerungen für Präzision und Komfort sorgen
In der Automobilindustrie sind Schrittmotorsteuerungen für eine Vielzahl von präzisen Aufgaben unverzichtbar. Ein hervorragendes Beispiel ist das adaptive Kurvenlicht und die Leuchtweitenregulierung. Hier sorgen Schrittmotoren und ihre Steuerungen dafür, dass der Lichtkegel des Scheinwerfers präzise an die Fahrzeugneigung, die Geschwindigkeit und den Lenkwinkel angepasst wird. Das erhöht nicht nur die Sicherheit bei Nachtfahrten, sondern auch den Fahrkomfort erheblich, da die Straße immer optimal ausgeleuchtet ist.
Auch in den Klimaautomatiksystemen moderner Fahrzeuge spielen Schrittmotoren eine zentrale Rolle. Sie steuern die Lüftungsklappen, die die Luftverteilung und die Temperatur im Innenraum regeln, millimetergenau. Ob Sie warme Luft an die Füße oder kühle Luft auf die Windschutzscheibe wünschen die präzise Positionierung der Klappen durch Schrittmotoren sorgt für das gewünschte Klima und trägt maßgeblich zum Komfort bei.
Ein weiteres kritisches Anwendungsfeld ist die elektronische Drosselklappensteuerung (ETC). Hier positioniert ein Schrittmotor die Drosselklappe im Antriebsstrang mit höchster Genauigkeit. Dies ist entscheidend für die Motorleistung, den Kraftstoffverbrauch und die Einhaltung von Abgasnormen. Die Steuerung muss hier extrem zuverlässig und reaktionsschnell sein, um eine optimale Motorsteuerung zu gewährleisten.
Die Zukunft der Schrittmotorsteuerungen in der Automobilindustrie ist geprägt von Trends wie einer noch stärkeren Vernetzung, etwa über CAN-FD oder Automotive Ethernet, und einer zunehmenden Intelligenz direkt im Treiber-IC. Ich erwarte auch eine weitere Miniaturisierung und eine Steigerung der Energieeffizienz, was angesichts der Anforderungen der Elektromobilität und der fortschreitenden Automatisierung, beispielsweise im Bereich des autonomen Fahrens, von größter Bedeutung ist. Diese Entwicklungen werden die Leistungsfähigkeit und Integration von Schrittmotorsteuerungen in zukünftigen Fahrzeuggenerationen weiter vorantreiben.
Kaufen oder selber bauen? Eine realistische Einschätzung
Die Entscheidung, eine fertige Schrittmotorsteuerung zu kaufen oder sie selbst zu bauen, hängt stark von Ihren Anforderungen und Ihrem Know-how ab. Der Kauf fertiger Module bietet erhebliche Vorteile: Sie erhalten in der Regel zuverlässige, getestete Produkte mit professioneller Qualität und oft auch Support vom Hersteller. Die Benutzerfreundlichkeit ist hoch, da die Module meist Plug-and-Play-fähig sind. Das spart Ihnen viel Zeit bei der Entwicklung und Fehlersuche, und Sie können sich auf Ihr eigentliches Projekt konzentrieren. Für die meisten professionellen oder semi-professionellen Anwendungen ist der Kauf die klar bessere Wahl.
Der Eigenbau von Schrittmotorsteuerungen birgt hingegen einige Herausforderungen und Fallstricke. Die Komplexität der Schaltung, insbesondere bei Chopper-Reglern mit Mikroschrittbetrieb, ist nicht zu unterschätzen. Die Auswahl der richtigen Bauteile, die korrekte Dimensionierung der Leistungskomponenten und die Entwicklung einer stabilen Leiterplatte erfordern fundiertes Elektronikwissen. Hinzu kommt die aufwendige Fehlersuche, die viel Geduld und spezielle Messgeräte erfordert. Nicht zuletzt sind Sicherheitsaspekte wie Überhitzungs-, Überstrom- und Kurzschlussschutz im Eigenbau nur mit erheblichem Aufwand zuverlässig umzusetzen.
Wann könnte sich der Eigenbau also lohnen? Meiner Erfahrung nach vor allem für Lernzwecke, um ein tiefes Verständnis für die Materie zu entwickeln. Auch bei sehr spezifischen Nischenanforderungen, für die es keine kommerziellen Lösungen gibt, oder bei sehr einfachen Projekten mit geringen Leistungsanforderungen und ohne kritische Präzision, könnten Kosteneinsparungen eine Rolle spielen. Dafür benötigen Sie jedoch:
- Fundierte Kenntnisse in analoger und digitaler Elektronik.
- Erfahrung im PCB-Design und Löten.
- Zugang zu Messgeräten wie Oszilloskop und Multimeter.
- Ein Verständnis für elektromagnetische Verträglichkeit (EMV).
- Die Bereitschaft, viel Zeit in Entwicklung und Fehlersuche zu investieren.
Die optimale Steuerung als Leistungsgarant für Ihr System
Die Wahl der richtigen Schrittmotorsteuerung ist keine Nebensache, sondern ein zentraler Faktor für den Erfolg Ihres Projekts. Ich hoffe, dieser Artikel hat Ihnen gezeigt, wie wichtig es ist, die Spezifikationen des Motors, die Anforderungen an Präzision und Laufruhe sowie die Umgebungsbedingungen genau zu analysieren. Zusammenfassend sind die wichtigsten Auswahlkriterien:
- Passende Motorspannung und Phasenstrom
- Erforderliche Mikroschritt-Auflösung
- Geeignete Schnittstelle für Ihren Controller
- Notwendigkeit von Open-Loop oder Closed-Loop
- Vorhandensein essentieller Schutzfunktionen
- Intelligente Features für Effizienz und Sicherheit
Die Zukunft der Schrittmotorsteuerung wird zweifellos von einer weiteren Zunahme an Intelligenz, Vernetzung und Effizienz geprägt sein. Mit fortschreitender Miniaturisierung und der Integration immer leistungsfähigerer Funktionen direkt in die Treiber-ICs werden wir noch präzisere, dynamischere und energieeffizientere Systeme sehen. Diese Entwicklungen werden neue Anwendungsfelder erschließen und die Grenzen dessen, was mit Schrittmotoren möglich ist, weiter verschieben.